

Le sens haptique et l’apprentissage du toucher
La perception
Lorsque l’on parle de perception, on évoque souvent les 5 sens : la vue, l’ouïe, l’odorat, le goût et le toucher. Selon une étude d’Hatwell (Hartwell 1994) en psychologie concernant la perception des informations, celles-ci sont perçues à : 83 % par la vision, 11% par l’audition, 3,5% par l’odorat, 1,5% par le toucher et 1% par le goût. Ceci nous indique que le toucher reste encore à ce jour, un système de perception très anecdotique, voire tabou et chargé de connotations, dans l’approche de notre environnement. (voir article)
La perception dépend de la localisation, des types de récepteurs et du type de contact pour le toucher. Sherrington (Callas 1998) présente une classification des récepteurs :

classification des sensations de Sherrington.
La perception peut être immédiate et distante, ou de contact, de proximité, tellement proche de nous qu’elle est intérieure, en nous, et non-consciente.
Mais percevoir, et en particulier lors de la perception tactile, c’est agir. François Magendie (1783-1855), un pionnier de la neurophysiologie française, écrivait en 1836 :
Les sensations sont le résultat de l'action des organes et par conséquent essentiellement active.
La sensation n'est pas un phénomène passif. Même poser la main sur quelqu’un, c'est déjà un geste, et tout est action.
Au commencement était le verbe…était l’action.
La perception n’est pas seulement une interprétation des messages sensoriels. Elle est également contrainte par l’action, simulation interne de l’action, jugement et prise de décision et anticipation des conséquences de l’action : il y a filtrage des informations données par les sens en fonction de ses projets propres. Un très grand nombre de mouvements exigent une anticipation ou une extrapolation fondée sur une estimation utilisant les expériences antérieures (rôle de la mémoire)
L’action de percevoir est une conjuguaison de fonctions sensorielles, neurologiques et cognitives. Henri Laborit nous dit, contre-intuitivement, qu’un cerveau, ça ne sert pas à penser, ça sert à agir, et en particulier sur son environnement. C’est ce qui nous différentie des plantes. Dans les fonds marins, le tunicier, mi animal, mi plante, digère son système nerveux une fois accroché à un récif.

La somesthésie
La somesthésie se compose du sens tactile, relayé par les récepteurs sensoriels épidermiques, dont la plus grande densité est située dans la face palmaire de la main. Ces récepteurs servent d’interface entre l’environnement et la peau. Ils permettent d’appréhender l’objet dans sa géométrie, sa rugosité, sa température.
La somesthésie se compose aussi du sens kinesthésique, c’est à dire la sensation interne de mouvement des parties du corps (sensibilité profonde des muscles et articulations). Ce sens permet d’appréhender des informations sur le poids d’un objet ou les forces reçues ou données sur un objet.
La perception kinesthésique
Ce sens renseigne sur les positions, les mouvements et les forces appliquées sur et par le corps. Ces informations viennent des récepteurs situés dans les tendons musculaires et les récepteurs de l’oreille interne.
Le sens proprioceptif est relatif aux stimuli internes émanant des récepteurs musculaires, labyrinthiques
Le sens extéroceptif est relatif aux stimuli émanant des phénomènes extérieurs au corps (poids, forme, rigidité, texture d’un objet)
La perception tactile
La bande passante (Shimoga 1992) du sens tactile (échelle de fréquences de perception des récepteurs) va de 1 à 400 Hz lors d’une perception normale et s’élever à 5000 ou 10.000 Hz lors de la réception tactile de textures très fines.
On distingue plusieurs types de récepteurs tactiles :
- Les thermorécepteurs pour la sensation de chaud et froid
- Les nocicepteurs pour la sensation douloureuse
- Les mécanorécepteurs liés à la sensation tactile.
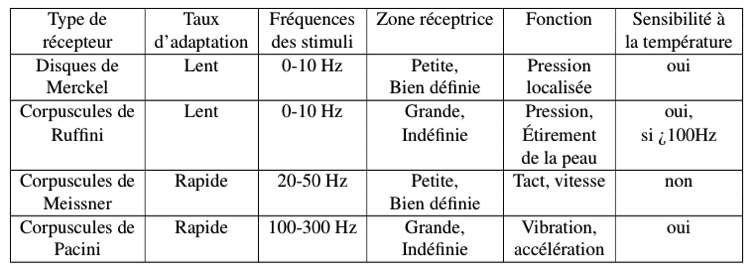
principaux récepteurs tactiles (Burdea, 1 edition August 3, 1996)
Les seuils de discriminations donnés par des études récentes montrent :
- La discrimination entre deux points de contact cutanés : de 1 à 2,5 mm
- Seuil de détection d’une force : 63 mg
- Seuil de perception d’un déplacement : 11,2 μm
Le sens haptique
Le mot haptique vient du grec hapto signifiant toucher et de haptiko : capable de toucher.
« Le sens haptique résulte de l'activité simultanée et coordonnée des récepteurs tactiles et kinesthésiques qui fournissent de l'objet une perception unique en trois dimensions (Rigal 2002). »
Ce serait le psychologue Revesz (Revesz 1950) qui aurait été le premier à utiliser ce terme désignant le système tactilo-kinesthésique de la main. Ce système comprend les récepteurs sensoriels de la main et les mouvements d’exploration de la main.
Le sens haptique donne et transmet des informations sur un objet, Loomis et lederman (Loomis et lederman 1986) ne limitent pas ce sens à la main mais peut s’appliquer à la bouche lors de la perception de la texture de la nourriture. Le terme « haptique » se réfère à la combinaison du système perceptif lié au toucher, à la kinesthésie associé aux mouvements d’exploration.
Le sens haptique ce n'est rien d’autre que le fait de prendre un objet. On glisse sur cet objet pour examiner sa texture. On appuie à sa surface pour apprécier sa consistance. On l’explore à pleine main pour vérifier sa tampérature. On place sa main en dessous pour le soupeser. On l’enveloppe dans sa main pour apprécier sa forme générale, ou on suit les contours à l’aide de ses doigts pour définir sa taille et sa forme exacte
Les mouvements d’exploration. Processus haptique.
Lors d’une tache d’exploration haptique, il faut considérer l’adaptation de l’ensemble du système corporel. Cette adaptation se fait à l’aide du système moteur. En premier lieu, le système moteur permet de contrôler la position du corps ainsi que les forces à mettre en jeu lors de l’interaction avec le monde extérieur.
Selon Massion (Massion 1992) durant un mouvement simple comme lever le bras en position statique, les premiers muscles à être activés, 50 ou 100 ms avant le mouvement du bras sont les muscles de la jambe pour le contrôle postural. ce sont des ajustement posturaux anticipateurs (APA).
En deuxième lieu lors du contact avec l’objet et après la perception tactile plusieurs sous systèmes haptiques interviennent.
- Le système cognitif
- Les fonctions de prise de décisions
- Le système moteur
- Les sensations psychophysiques issues de l’interaction avec l’objet (les informations tactiles issues des récepteurs).
On peut ainsi donc considérer un processus haptique de haut niveau (le système cognitif et l’intention) et un processus haptique de bas niveau (les sensations des récepteurs). (Lederman S. e. 1987)
Le processus d’exploration haptique peut s’initier de « haut en bas » lorsque l’on recherche une information particulière (processus cognitif) à propos d’un objet (sa forme, sa texture, sa dureté) à l’aide des récepteurs manuels (processus sensitif tactile).
En ostéopathie, le thérapeute peut aller chercher une information sur la forme, la dureté et sa main va s’adapter à la zone corporelle testée et au processus haptique recherché.
Ce processus d’exploration haptique peut, à l’inverse, s’initier de « bas en haut » en commençant par la perception tactile et déclencher un processus cognitif lui permettant d’explorer différemment et de rechercher d’autres informations.
Dans ce cas, l’ostéopathe va poser une main sans intention particulière et recevoir des informations tactiles venant de cette zone corporelle (la température ou la texture de la peau) et ensuite adapter sa main aux informations reçues (pour une meilleure réception) ou chercher des informations différentes (la forme).

Schéma du processus haptique. Wall, S. (2000).
Modèles des mouvements d’exploration
- Le mouvement latéral (textures) : Typiquement, les doigts frottent dans les deux sens une petite zone. Des surfaces intérieures sont explorées, plutôt que des bordures.
- La pression (conformité) : Une force ou un couple est appliqué à l’objet, ce dernier étant stabilisé.
- Le contact statique (température, étirements): L’objet est soutenu, tandis qu’une main se repose passivement sur lui.
- Le maintient (poids) : L’objet est soulevé et maintenu dans la main, sans chercher à le serrer. Il s’agit typiquement d’un effort du bras ou du poignet.
- L’enveloppement (forme, volume global) : La main assure le plus de contacts possibles avec l’objet. Les doigts, la paume sont mis à contribution.
- Le suivi de contours (forme, volume exact) : Le mouvement est continu et non-répétitif sur un bord de l’objet. Une main peut maintenir l’objet en place.
Les illusions perceptives les plus courantes : (Wall S. 2000)
- Les courtes distances sont généralement surestimées, les longues distances sont sous estimées.
- La mémoire des distances est moins persistante que la mémoire des positions
- La reproduction d’un mouvement actif, en terme de distance et de position, est plus exacte que pour un mouvement passif.
Les résultats expérimentaux ont indiqué que dans une tâche libre d’exploration, le mouvement de la main dépendait de la caractéristique recherchée.
Le sens haptique nous amène à distinguer le mouvement, du geste et de l’acte. Le mouvement est le déplacement du corps ou d'une partie du corps de façon volontaire. Dans le mouvement on ne prête pas nécessairement attention au but poursuivi ni au sujet qui l’exécute. Le mouvement est brut.
Le geste est lié à la capacité de parole, il exprime une volonté, une pensée et non pas seulement des sensations ou un mouvement affectif, le geste est porteur d'une intention envers quelqu'un, le mouvement est porteur d'aucun sens.
« Le geste constitue une totalité signifiante ». (Ricoeur P. 1982)
Il implique tout l’être qui le produit dans ses dimensions physiques et mentales. Il est lié à la posture. Jean Marie Gueullette (Gueullette, J. M. 2014) nous dit que contrairement aux mouvements que l'on peut désigner par un verbe d'action ou un mot, le geste est porteur d'un sens, d'une intention, qui s'inscrit dans une relation à l'autre, parfois symbolique, il s'inscrit dans une culture, dans un ensemble de significations que partagent les personnes de cette culture.
Le geste manifeste la possibilité d'une unité de l'être humain, d'une cohérence profonde entre le mouvement du corps et l'intention de l’âme. C'est la notion de justesse. Dans l'acte l’attention est focalisée sur ce qui est visé et produit. On ne s'intéresse ni au sujet qui agit, ni dans la manière dont il agit.
Le geste ostéopathique qu’il soit diagnostique ou thérapeutique, prend ici toute son ampleur et sa signification. Le sens du toucher subjectif et la relation à l’autre crée l’émergence d’une relation thérapeutique de sujet à sujet qui a encore beaucoup de mal à se nommer, à s’exprimer.
Références
Hatwell, Y. (1994). Traité de psychologie expérimentale. Paris: P.U.F.
Calas, A. (1998). Précis de Physiologie. Paris: Doin.
Berthoz, A. (1997). Le Sens du Mouvement. Editions Odile Jacob.
Shimoga, K. (1992). Finger force and touch feedback issues in dextrous telemanipulation. Proceedings of NASA-CIRSSE International Conference on Intelligent Robotic Systems for Space Exploration, Greenbelt.
Rigal, R. (2002). Motricité humaine: fondements et applications pédagogiques (Vol. 1). Presses univ. Québec.
Revesz, G. (1950). Psychology and art of the blind. New York: Longmans.
Loomis, J. M., & Lederman, S. J. (1986). Tactual perception. In K. R. Boff, L. Kaufman, . J. P. T. New York: Wiley / Interscience. Handbook of perception and human performance.
Massion, j. (1992). Movement, posture and equilibrium: interaction and coordination. Progress in neurology, , 38, pp. 35-56.
Lederman, S. e. (1987). Haptic exploration in humans and machines : An initial overview. Rapport technique, Office of Naval Research.
Wall, S. (2000). An investigation of temporal and spatial limitations of haptic interfaces. University of Reading.
Ricoeur, P. (1982). Poêtique et symbolique. Dans F. Reloulé. Initiation à la pratique de la théologie. Paris: cerf.
Gueullette, J. M. (2014). La beauté du geste. Paris: cerf.
Le toucher: un sens essentiel pour apprendre
Au milieu des œuvres d'art de la galerie tactile du musée du Louvre, Édouard Gentaz, spécialiste de psychologie du développement, analyse l'importance du sens du toucher dans la cognition et ...
https://lejournal.cnrs.fr/videos/le-toucher-un-sens-essentiel-pour-apprendre



/image%2F1976184%2F20170725%2Fob_147560_sans-titre.png)
/image%2F1976184%2F20160222%2Fob_d80880_accueil1.jpg)
/http%3A%2F%2Fwww.college-de-france.fr%2Finterface%2Fvideo-default-480x360.png)
/image%2F1976184%2F20160218%2Fob_0bac75_sans-titre.png)
